
Nicholas Rehm may be a full-time aerospace engineer, but his success in constructing a DIY self-flying drone that avoids obstacles without standard GPS tech aboard still merits a standing-O. He also gets a deep bow for describing the serious wonkitude involved in a thoroughly entertaining way.
Rehm is no neophyte to homemade drone projects – with or without GPS assistance. Given the education and experience required for his day job, no doubt, his DIY endeavors tend to be a great deal more complex than the typical amateur craft that get (as woebegone Soviet citizens used to put it) “snotted together.” His YouTube page contains over a dozen instructional videos of how he devised and assembled his way-complex UAVs, usually relying on wry understatement or irony to cut the thickness of complex processes he’s detailing.
Quite clearly, Rehm not only brings his work home with him, but indeed creates additional labors of love to infect others with his passion for drones and other aerial craft.
“I am a full-time aerospace engineer, but I like to work on interesting flying projects in my free time: drones, airplanes, VTOL, and everything in between,” he says on his video page. “My goal is to share what I learn along the way and make advanced concepts less scary.”
Which is exactly the miracle he pulls off in this video describing how he made a DIY drone that avoids obstacles without using the standard GPS tech aboard most UAV – and without even needing to be connected to outside communication feeds. Which not only makes his autonomous vehicle immune to collisions or outside jamming devices, but immeasurably cool to boot.
Rehm’s initial idea was to find a viable alternative to habitual autonomous navigation and obstacle avoidance systems. Those require a pre-planned flight path to be entered on a map, waypoint-by-waypoint, that the craft follows in sequence until it reaches the designated destination.
“The drone is actually quite dumb in that it can only fly from one point to the next with no real perception of the world around it, needing to be told what to do for every step of the way,” Rehm explains in the video.
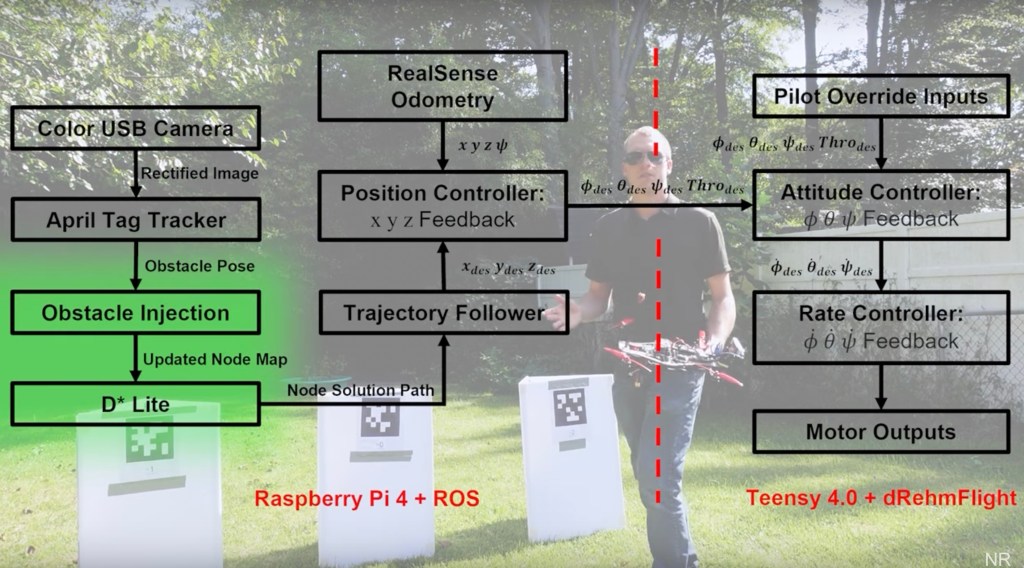
To remedy that, he replaced the foresworn GPS with algorithms powering Google Maps. Those interact with data picked up from the drone’s onboard internal measurement unit, cameras, altitude gauge, position and movement detectors. All of that, orchestrated by a Raspberry Pi 4 using a Robot Operating System, allow the craft to find the way around obstacles it encounters as it advances.
Unlike sequentially progressing as in waypoint-based systems, Rehm’s drone is only told where to go and eventually return to, and is on own from there. As the video demonstrates, when the UAV encounters an obstacle, its programs detect a clear but limited area to either side to take to avoid them. That confined free space detection range is used each time the advancing UAV encounters an obstruction, taking a baby step route around each, but otherwise flying freely until it reaches its destination.
Rather breezily brushing aside the formidable math and engineering needed to pull a feat like his off, Rehm reminds viewers his DIY project is just one of many they can take to greater heights.
“Once you have the building blocks in place for a complex project like this, it’s pretty easy to go back and expand on those individual elements to make the overall system more capable,” Rehm says at the end of the video, his GPS-less drone hovering a few feet away. “For example we could swap out that AprilTag detection algorithm I used for something more robust to maybe detect buildings; or we could expand our motion planning from two dimensions to three.”
Easier for Rehm to say (and believe) than most, though it’s clear he’s sincere in closing out by expressing the motivation for his cutting-edge “snotted together” drone videos.
“I hope you learned something interesting.”
FTC: We use income earning auto affiliate links. More.
Comments