Researchers at UC Berkeley have developed a drone whose hinged arms can fold themselves from horizontal to vertical position in order to pass through tight spaces or carry light objects.
The objective of researchers at Berkeley’s High Performance Robotics Laboratory (HiPeRLab) was to design a quadcopter capable of raising and lowering its arms while in flight to adjust to limited spaces, or increase the tasks it could perform. To do that, they inserted hinges between the body of the square craft and its rotor-equipped appendages to enable their lowering and raising. In contrast to other experimental UAVs tricked up for similar folding movement, however, HiPeRLab scientists figured out a way for the drone itself to power all that flapping.
Previous limb-adjusting vehicles created by labs like Purdue University’s Engineering Technology school were outfitted with actuators that shifted the arms and rotors into different positions, making them more efficient in certain conditions like heavy winds. The HiPeRLab staff wanted to avoid inclusion of actuators, which draw off the drone’s batteries and thereby reduce its flight time. Their solution: use passive hinges whose up and down folding is powered by the rotors themselves.
In their paper, “Design and Control of a Midair Reconfigurable Quadcopter using Unactuated Hinges,” HiPeRLab’s Nathan Bucki, Jerry Tang, and Mark W. Mueller go into detail on how their self-folding drone functions. Though this video is even more non-geek accessible, the trio explain how their system works in fairly plain terms.
“Configuration transitions are accomplished by either reducing or reversing the thrust forces produced by specific propellers during flight,” they write. “Constraints placed on the control inputs of the vehicle prevent the arms from folding or unfolding unexpectedly, allowing for the use of existing quadcopter controllers and trajectory generation algorithms. For our experimental vehicle at hover, we find that these constraints result in a 36% reduction of the maximum yaw torque the vehicle can produce, but do not result in a reduction of the maximum thrust or roll and pitch torques. Furthermore, the ability to change configurations is shown to enable the vehicle to traverse small passages, perch on hanging wires, and perform simple grasping tasks.”
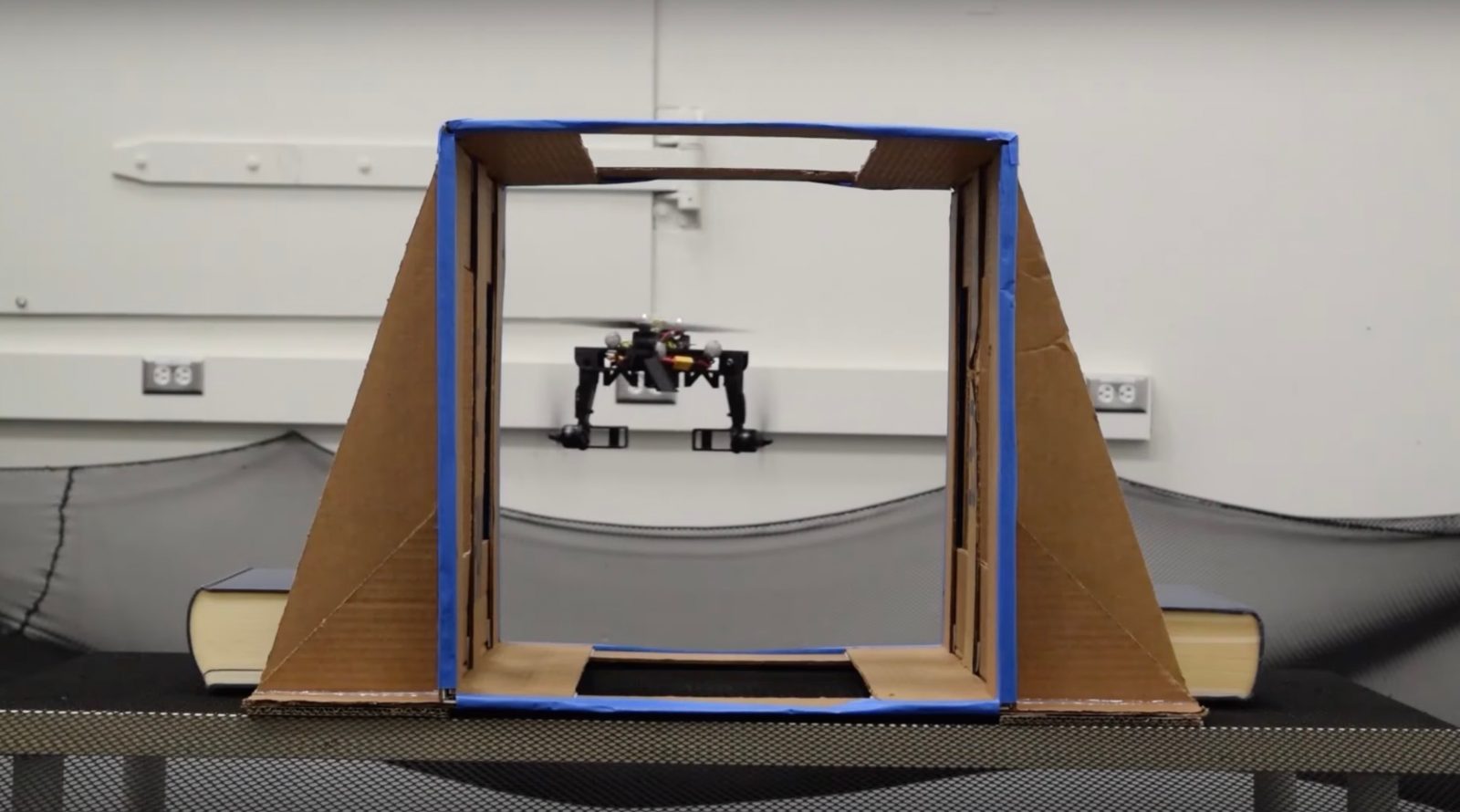
In even plainer language, a specific shift in propeller thrust creates the force necessary to lower (or later lift) two opposing arms without interfering in the other pair’s ability to keep the drone aloft. In those vertical positions, the two folded limbs allow the slimmed-down craft to pass through a constrained space “sideways,” or grasp light objects for transporting elsewhere.
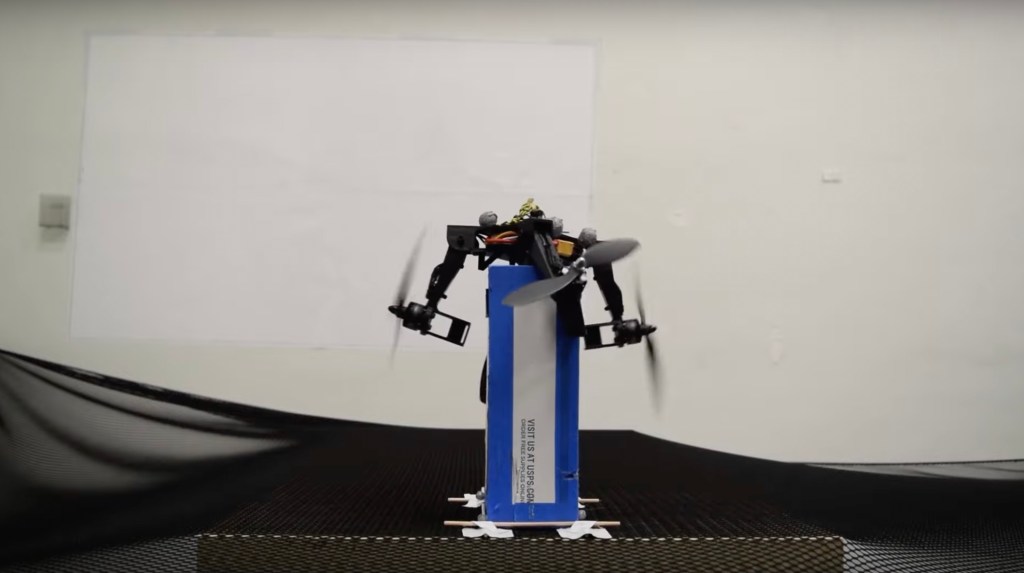
In the hands of a maestro of the controller, meanwhile, the passive hinges allow the drone to be lowered down to, and come to rest on, an elevated rope or wire, using its folded, hanging arms to center its weight.

FTC: We use income earning auto affiliate links. More.

Comments