Fancy being able to reach faster speeds while getting better battery performance in the air? A group of researchers at UC Berkeley may have found a way to provide that by experimenting with self-tilting rotors that keep their drone flat, thus reducing drag.
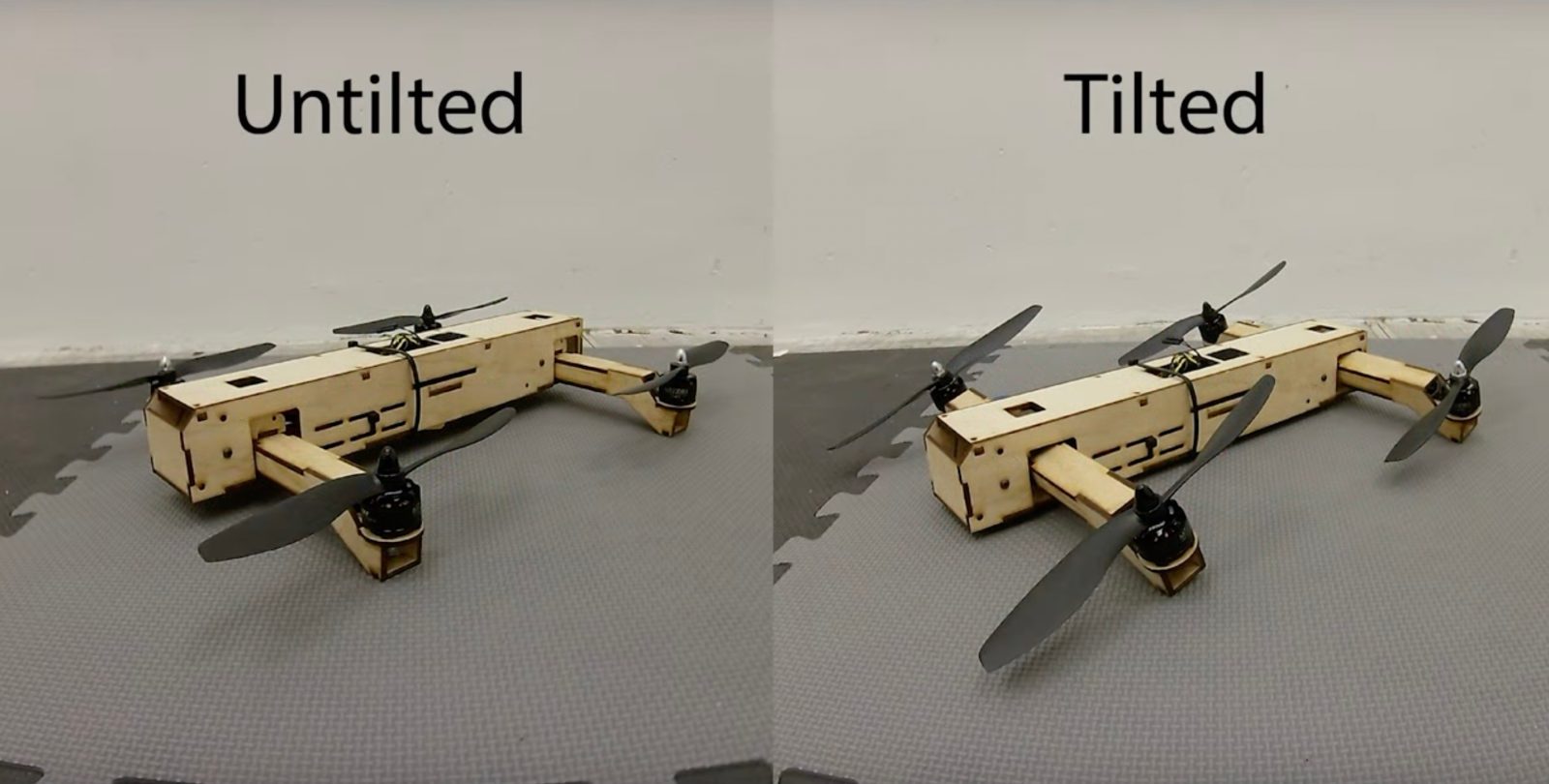
Tests with the tilting rotor drone were carried out by staffers at Berkeley’s High Performance Robotics Lab, Department of Mechanical Engineering, and sought to minimize the craft’s “drag area and therefore (allow) for faster, more agile, and more efficient flight.” To do that, they created a quadcopter with an unactuated rotor tilting mechanism whose pivoting propellers enabled rapid forward movement while keeping the drone’s body flat – a position that minimizes aerial friction and yields enhanced performance.
Read: Berkeley researchers design self-folding in-flight drone arms
Indeed, during their trials, the team found their test drone – during periods of added thrust – flew 12.5% faster with titling rotors than the same craft with propeller units locked in fixed positions. The flexible UAV’s agility at top velocities was also 7.5% higher than when operated in the conventional configuration, and attained 20% better energy efficiency.
Meaning, of course, if the titling rotor mechanism were adapted to mass marketed drones, pilots could be flying faster missions of longer duration thanks to improved battery life.
Of course, work has already been done to develop tilting rotor mechanisms on drones, but thus far those have all relied on adding actuators to shift the props into place.
The Berkeley experiment, by contrast, linked the pivoting parts to the wings with springs, which held them horizontal to the body at lower speeds of flight but allowed them to shift downward in response to oncoming wind pressure during acceleration.
Read: Protecting a drone with tensegrity
Unlike traditional drones whose nose dips downward during thrust – exposing the back portion to greater degrees of drag – the titling rotors allowed the test craft to remain flat and more aerodynamically efficient. Win-win.
But while increased speed and energy efficiency are clearly big achievements attained by the innovation, the Berkeley researchers noted in their written presentation that there are some tradeoffs.
“(T)his vehicle has a slightly reduced range of thrust and torques,” they note. “This is because to prevent unintended tilting and untilting, additional thrust constraints on the propellers need to be imposed. In addition, there is a slight increase in the mass and mechanical complexity of the vehicle due to the addition of the tilting mechanism.
“Therefore, we argue that the proposed design is advantageous to existing solutions where the quadcopter is primarily expected to take off and land vertically, and fly at a high speed with high agility,” they continue. “Such applications are common when the targets are time-sensitive, e.g. long-distance package delivery, drone racing, search and rescue.”
FTC: We use income earning auto affiliate links. More.
Comments