
It’s been a spell since DroneDJ looked in on aerial DIY maestro, engineering whiz, and geek genius supremo Nicholas Rehm, who of late has been working new scientific magic developing a bodyless multi-rotor drone that uses 300% less battery power when the entire craft starts spinning like a detached helicopter blade – and remains aloft with two of its three motors shut down.
Editorial avowal right off the top: Despite Rehm’s efforts in all his videos to make his exploratory home UAV projects accessible to non-experts, even the most rudimentary theorems and calculations used in developing his spinning drone concept are beyond the ken (and descriptions) of this post. What follows, then, is an attempt at ballpark generalizations of his dervish craft – albeit a stadium the size of Alaska to allow for lurching approximations.
Read: UAV wonk builds obstacle-avoiding DIY drone without GPS
Rehm first went about creating a spider-like craft whose three motors sit upon tilting rods attached to a central node with a single servomotor – the sum of which was either flown straight ahead like a regular drone, or in spinning mode.

After affixing wings to the spindly arms, Rehm discovered that rather than losing half of the upwards thrust when pivoting the rotors forward to enable 250 rpm rotation as before, the craft instead gained 300% in flight efficiency.

Not satisfied with that, Rehm – who in his trademark impish style describes himself as “a full-time aerospace engineer who goes home after work and keeps aerospace engineering” – began examining how a spinning drone would actually be used. What are the advantages? For that matter, which side is the front – and at what moment of its rotation?
Though he quickly demonstrated the stability and efficiency of the craft in normal forward flight, Rehm subsequently established that by turning the drone into a giant propeller in spinning mode, so much additional lift was created that he could keep it aloft and under control after shutting two of its three motors down. Score that as a distinct advantage over conventional UAVs, which often imitate rocks after losing even a single prop. Ditto the increased upward thrust being created with decreased battery drain.

To designate an area as the swiftly rotating craft’s front, Rehm used LED lights on the wings set to illuminate when they passed a particular spot – the drone’s visible “go west” indicator.
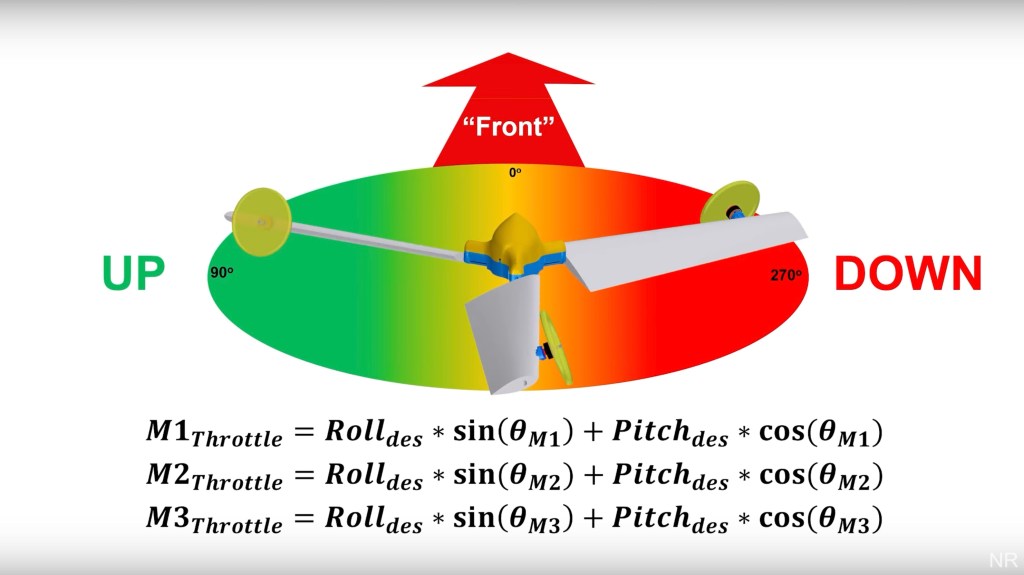
He then used “M1, M2, and M3 throttle = roll(des) sine” calculation-thingies, further jazzed up with cosine doodads, to program the motor to automatically offset excessive roll, pitch, and yaw – creating improved stability and greater pilot control of the airborne buzzsaw.
The result was increased power efficiency of spinning mode, with the light indicators permitting the forward flight of a conventional drone. Rehm’s response to his creation: “That is so scary!”
Read: UAV wonk (and hero) builds inverted pendulum-flying drone
Rehm notes that the flying top remains a bit more wobbly than store-bought craft when flown manually, but mostly because he intentionally eschewed using GPS or position hold tech – for now, anyway.
“Flying this feels very similar to an acrobatic helicopter, and it’s quite fun,” he says. “While this drone certainly isn’t as optimized as it could be, I’m really happy with how this whole project turned out. It may not be replacing your boring camera drones anytime soon, but it goes to show the established drone configurations aren’t the only options we have if we’re willing to put a little extra care into the design.”
Rehm says he’ll revisit the concept in the future, possibly adopting a bi- or X-wing design to enhance forward flight performance, or using a fixed-frame fuselage compatible with a (boring) camera gimble. Here’s also hoping there will be no more of those frightening sine and cosine thingamabobs in his next mad scientist unboxing.
FTC: We use income earning auto affiliate links. More.

Comments